深圳先进院在穿戴式手术机器人信息融合领域取得新进展
近日,中国科学院深圳先进技术研究院生物医学与健康工程研究所微创中心穿戴式手术机器人项目组在信息融合领域取得新进展,相关成果Towards Characterization and Adaptive Compensation of Backlash in a Novel Robotic Catheter System for Cardiovascular Interventions近日被国际生物医学电路与系统领域旗舰刊物IEEE Transactions on Biomedical Circuits and Systems接收(DOI:10.1109/TIE.2017.2764870)。论文的共同第一作者是深圳先进院博士生Olatunji Omisore和研究助理韩世鹏,通信作者是王磊研究员。
微创介入手术机器人的精确感知与精准操控有重要的临床意义,是亟待解决的应用基础科学问题。一旦取得突破,将与介入影像学、新型术中成像、虚拟现实导航等方面的最新科研进展相结合,显著提升机器人介入手术的综合治疗水平。与机器人技术的发展相对应,可穿戴技术也在迅猛发展之中。可穿戴技术结合人体生理学与人体工效学原理,综合运用MEMS传感器与执行器、低功耗人体传感器网络和医学智能信息获取与交互手段,在小型化、穿戴化发展的同时,提高了设备/器械的感知和操控精确度,从而使得通过穿戴式设计来提升微创手术机器人的精确定位能力的想法具有可行性和实际意义。项目组经过充分的理论研究,提出了一种介入手术机器人反冲补偿的新机制,并对关键控制变量进行了特性化,系统在血管仿体上完成了实验评估,取得了良好的实测效果。
该项研究得到了国家自然科学基金-深圳机器人联合基金重点支持“穿戴式精确定位介入手术机器人的力觉感知与导丝操控机理(U1713219)”、国家科技部863计划“脑血管实时介入移动式手术机器人(2015AA043203)”及中科院重点部署等项目和课题的资助,表明深圳先进院在穿戴式人体传感器网络领域科研工作的不断深入和科学目标的进一步拓展。
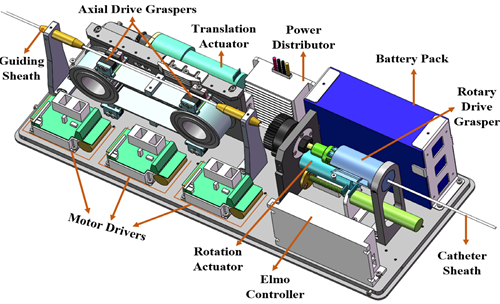
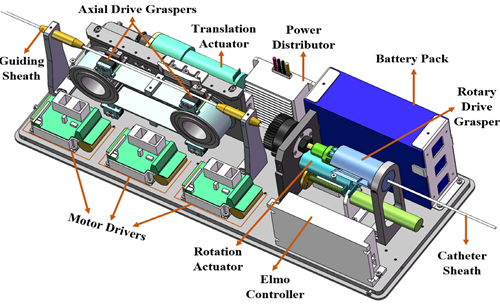
图1 介入导管导丝操控模块的总体框图
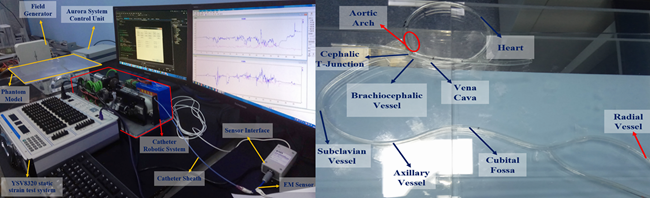
图2 实验评估系统(左:硬件系统;右:血管仿体)