科研团队提出新策略:磁驱微型机器人可在人体内实现全向动态操控
在医疗领域,低强度磁场无线驱动的磁性微型机器人展现出巨大的应用前景。这些机器人可以在面向医疗场景的狭小空间中运动,并完成复杂作业任务, 如靶向药物递送、微操作、微创手术等。
然而,磁性微型机器人的实际应用也面临一些挑战。挑战之一便是如何利用可移动的磁驱动系统在人体尺度空间内生成稳定、高效的动态磁场,同时避免磁驱动系统与人体或其他医疗设备的潜在碰撞安全问题。
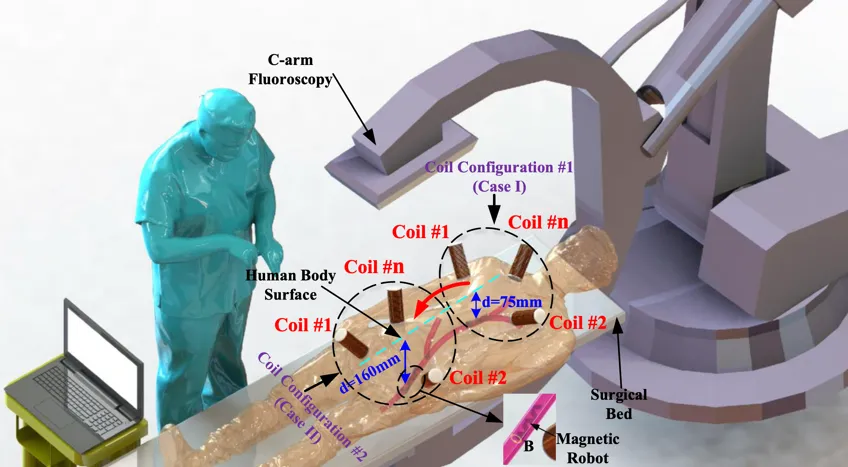
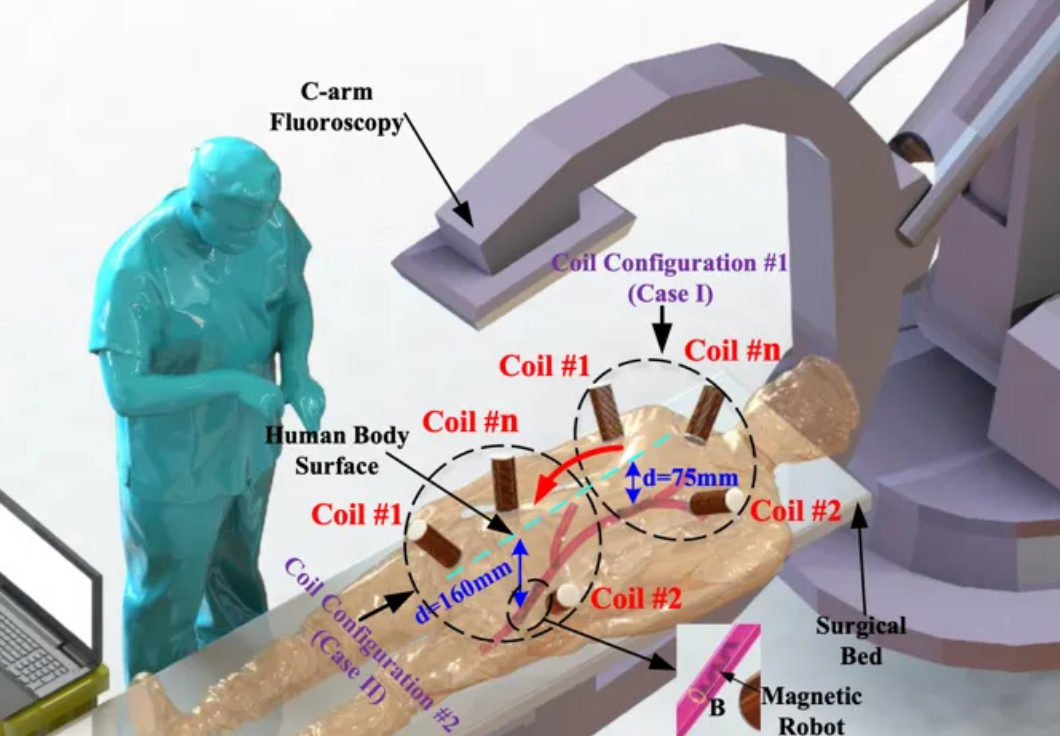
图1. 可移动多线圈磁驱动系统实现磁性微型机器人运动控制示意图。考虑到线圈与人体之间可能发生碰撞以及磁场需求,不同场景需要不同的线圈构型(coil configuration)以提高驱动效率。
针对这一挑战,多电磁线圈系统可以通过高频控制系统中每个线圈的电流生成复杂的磁场分布,这对多自由度操控或多模态磁场操控任务具有重要的意义。但现有可移动磁控系统虽能覆盖较大的工作空间,却在磁场的各向同性优化方面仍存在空白,且在实际部署时易受外界环境因素的制约。
此外,现有研究方法大多聚焦于空间单一目标点的磁场构建,而忽视了目标区域内磁场分布的均衡性,这一局限性可能导致在特定空间方向上产生非预期的梯度力,进而影响微型机器人的精确操控,成为制约其广泛应用的一大障碍。
提出新策略,实现空间局部区域内磁场各向同性控制
近日,中国科学院深圳先进技术研究院徐天添研究员团队与香港中文大学张立教授团队强强合作,就人体空间尺度内各向同性磁场调控这一问题进行了深入研究。通过引入各向同性磁场的评价指标,并详细分析线圈数量和分布对于磁场分布的影响,研究团队提出了一种基于性能引导的磁场多目标优化策略,实现了在约束工作空间中生成具有各向同性的动态磁场。 该研究成果的相关论文以题为“Performance-Guided Rotating Magnetic Field Control in Large Workspaces with Reconfigurable Electromagnetic Actuation System”刊登在IEEE Transactions on Robotics期刊上。
论文上线截图
此外,研究团队还研发了一套基于三台六自由度机械臂构成的可重构电磁线圈驱动系统(REMA)。为了验证所提方法的实用性与有效性,研究团队利用REMA系统产生的旋转场,成功在微型机器人上完成了相关实验应用。
中国科学院深圳先进技术研究院蔡明学副研究员为论文的第一作者、吴新宇研究员为共同作者。徐天添研究员和张立教授为该论文的通讯作者。
基于性能引导的磁场多目标优化策略:厘清线圈构型与磁场分布
电磁线圈构型,即线圈的数量和空间分布,对产生的磁场分布起着至关重要的作用。对于利用高频变化的磁力矩推进的微型机器人而言,为了确保机器人在多样化场景下的运动稳定性和精确性,常需采用不同的线圈构型来提升磁场的各向同性,从而消除特定方向磁场强弱变化对机器人运动的影响,同时降低线圈能量消耗。
得益于研究团队所提出的基于性能引导的磁场多目标优化策略,研究人员能够实现帕累托最优线圈构型,从而使磁场在保证各向同性的同时,提高磁场的效率。
为了对这一优化成果进行实证检验并推动其实际应用,研究团队首先构建了一套全面的指标体系,该体系专门用于在空间区域内对不同线圈构型所产生的磁场性能进行量化评估。这一指标体系不仅支持各向同性磁场评价指标的精细设计,还为线圈构型的深入分析提供了有力工具。为了进一步提升磁场生成的灵活度与精确度,团队还开创性地引入了一种性能驱动的优化流程,通过对线圈配置的精细调校,成功生成了具有高度各向同性特征的旋转磁场,为微型机器人的精确操控与稳定运动提供了坚实的技术支撑。
线圈配置的有效性紧密关联于应用场景。例如,在图2情景I中,三个线圈紧邻机器人布置,以便在能量消耗较低的情况下生成较大磁场。然而,鉴于潜在的碰撞风险,同样的线圈构型在情景III中可能不会产生最佳效果。针对维持稳定的各向同性磁场以及线圈耗能的挑战,研究人员开发了一套在空间区域内评估不同线圈构型所产生磁场性能的指标体系,包括磁场分布的各向同性指标以及磁场驱动矩阵的各向同性指标。
具体来说,首先在3D空间中定义不同方向的期望单位磁场,基于所采样的线圈构型,计算在空间区域内实际生成的磁场评价指标曲线。此外,还充分考虑了线圈与人体之间的避碰约束。研究人员通过分析发现,存在某个特定的线圈构型,能使所设计的评价指标达到比较理想的效果。
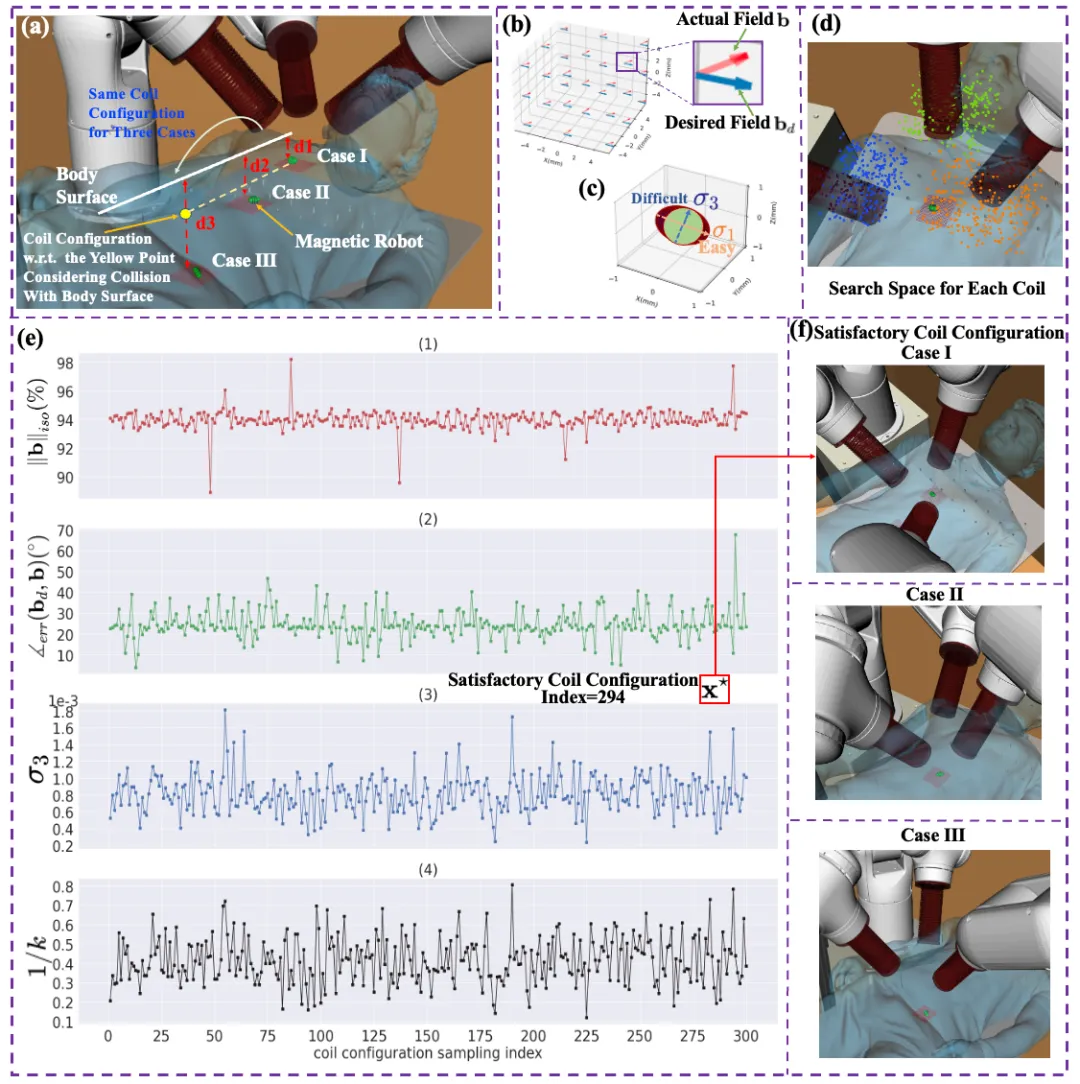
图2. 各向同性磁场评价指标设计及线圈构型分析
鉴于不同的线圈构型可以实现不同的局部磁场分布,因此,探索在指定空间内寻找最佳线圈构型以实现各向同性磁场控制的方法显得尤为重要。值得注意的是,虽然让线圈尽可能靠近目标区域,可能会提高磁场强度与电流的比率,但磁场分布的各向同性可能会降。这表明:优化一个性能指标可能会以牺牲另一个指标为代价。因此必须根据应用需求做出权衡。
基于设计的四个评价指标和界定的线圈构型空间,研究人员将寻找最佳线圈构型的过程构建为一个多目标优化问题,目标是最大化性能标准。为确保所生成磁场的各向同性和高效性,研究团队提出了一种性能引导的优化方法(如图3)。
首先,根据实际场景的限制,设计出可行的线圈构型空间,以防止操作时发生碰撞。然后,基于上述的评价指标,设计了对应的优化目标函数。在优化过程中,通过计算每一个线圈构型所生成磁场的评价指标,系统能够自适应调整线圈构型和电流,最终生成帕累托最优线圈构型。该线圈构型不仅在大工作空间内避免了线圈碰撞,还确保了磁场具有各向同性和高效性,增强了在复杂环境下的磁场操控能力。
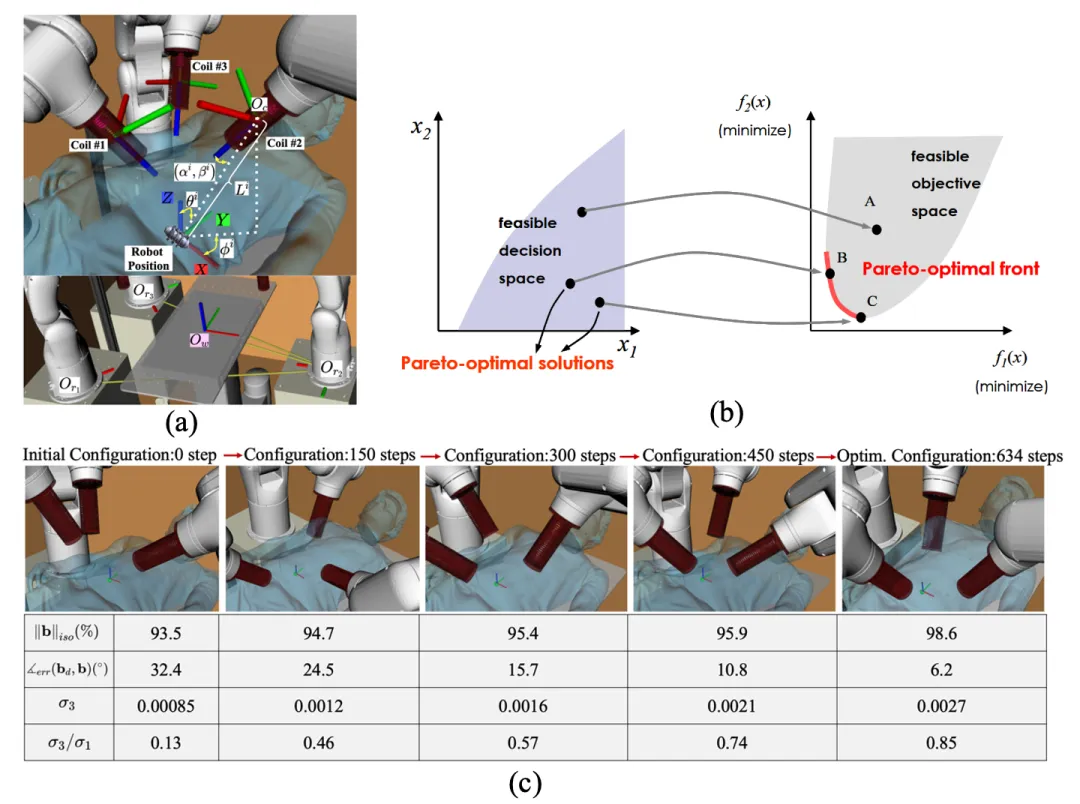
图3. 基于性能引导的磁场多目标优化方法
为了证明帕累托最优线圈构型的有效性,研究人员从可行空间中采样了两个不同的线圈配置,并计算了对应的磁场评估指标。图4结果表明,帕累托最优线圈构型在性能上优于线圈构型#1和线圈构型#2。同时,为了评估线圈耗能问题,研究人员针对旋转磁场,计算了一个周期内每个线圈的累计电流,并发现帕累托最优线圈构型的电流消耗远低于其他两种线圈构型。此外,这三种线圈构型中任意两个线圈之间的最大电流消耗差异分别为5.2 A(线圈构型#1)、6.9 A(线圈构型#2)和2.6 A(帕累托最优线圈构型)。
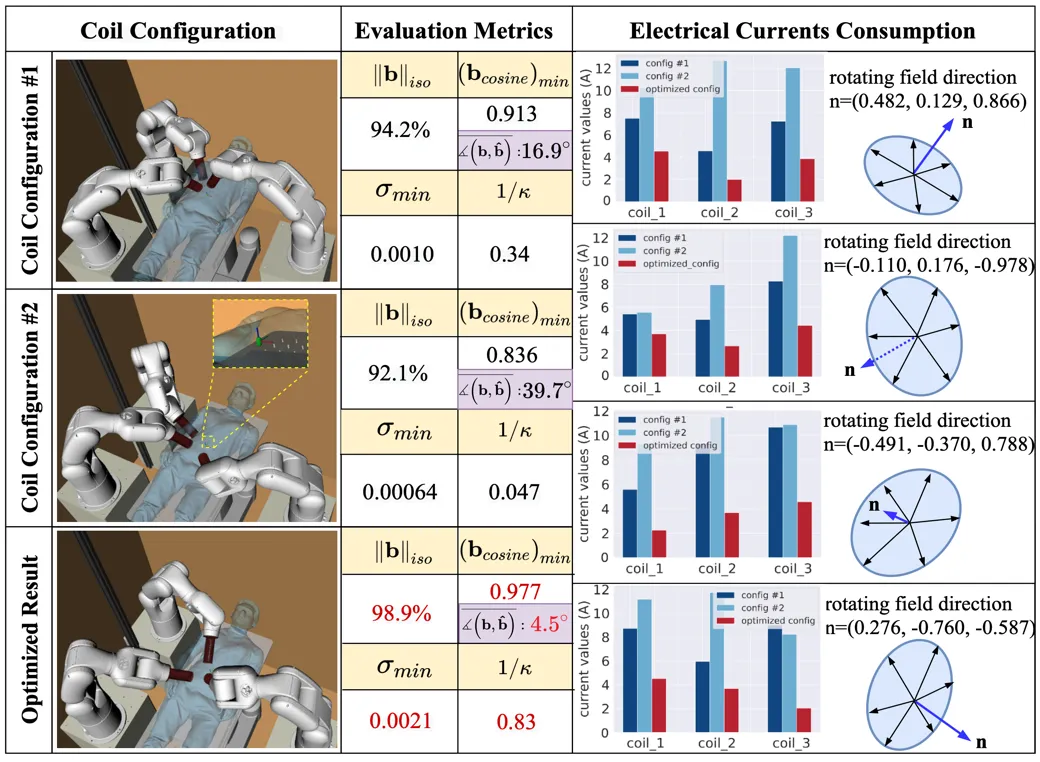
图4. 帕累托最优线圈构型和非优化线圈构型性能对比
可重构电磁线圈驱动系统REMA:验证应用前景
为了验证所提算法的可行性、有效性及其在不同磁驱动场景中的适用性,研究人员特别开发了一种可重构电磁驱动系统。该系统通过在三个独立的机械臂末端安装三个电磁线圈,不仅能够在较大工作空间内自由移动,还能够产生不同线圈构型,为验证提出的线圈配置优化策略提供了强有力的实验支持(如图5)。此外,研究人员基于ROS框架构建了整个系统的软件架构和仿真环境,大大提高了算法的调试和实验进程。
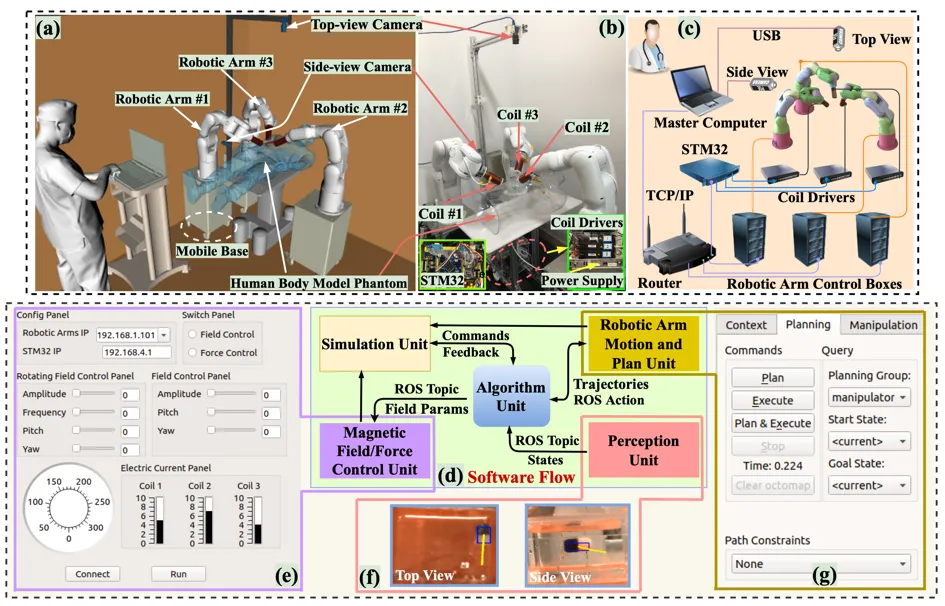
图5. 可重构电磁线圈系统
为了深入探索并验证应用潜力,研究团队依托REMA平台精心设计并实施了一系列实验,这些实验覆盖了多种复杂环境,具体包括在2D tube环境、3D tube环境和3D自由空间环境中驱动微型机器人。
1.碰撞约束场景下的不同帕累托最优线圈构型磁场控制研究
为了验证所提方法在不同场景中的适应性,研究团队特别关注了线圈构型与人体之间的碰撞约束问题。图6展示了微型机器人在人体模型中不同深度位置时,优化得到的不同的帕累托最优线圈构型。
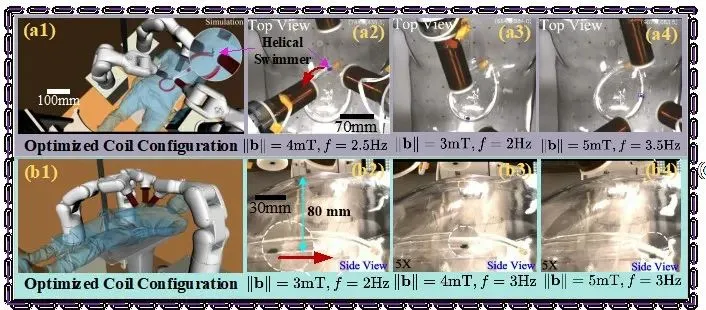
图6. 考虑碰撞约束下的帕累托最优线圈构型驱动微型机器人
可以明显看出,在两种不同深度下,线圈构型存在显著差异,这是因为在优化过程中考虑了线圈与人体之间可能发生的碰撞。实验结果表明,在两种不同的构型下,机器人均展现出良好的运动性能,从而证明了该方法在磁场控制中的有效性。
2.帕累托最优线圈构型对梯度力影响的减弱作用研究
非优化线圈构型可能会在机器人运动的反方向或者侧面产生较大梯度力,进而阻碍其正常运动。为了证明这一影响是由梯度力引起的,研究人员生成了两种线圈构型:非优化线圈构型和帕累托最优线圈构型,并且设置了相同的目标磁场参数来驱动机器人在三维自由空间中运动。
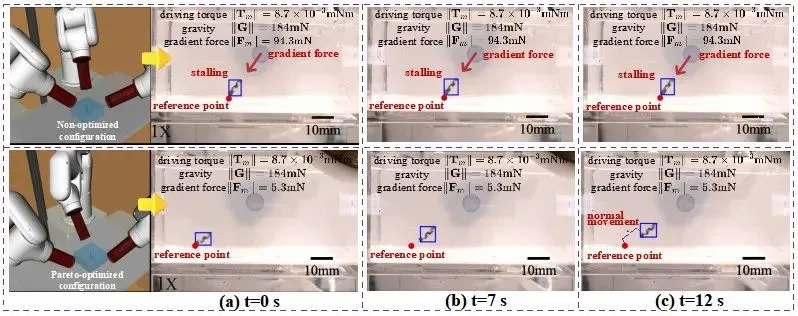
图7. 不同线圈构型所产生的梯度力对机器人运动的影响
从图7中的实验结果可以发现:非优化线圈构型在机器人的运动反方向产生了较大的梯度力(94.3 mN),导致在0秒到12秒的三维空间中没有产生有效位移(即stalling状态)。相比之下,帕累托最优线圈构型由于能够保持磁场的各向同性,最大限度的消除梯度力(5.3mN)的影响,机器人能够实现正常运动。
3.帕累托最优线圈构型下机器人在3D空间中路径跟踪控制研究
为了进一步验证帕累托最优线圈构型在精准驱动微型机器人实现3D路径跟踪任务上的能力,研究人员利用双目立体视觉实时追踪机器人在3D空间中的位置信息,并借助纯路径跟踪的控制方法来调控磁场参数,使机器人在3D空间中完成了精确路径跟踪。如图8所示的结果表明,机器人能够较好跟踪预设的三维路径,跟踪误差保持在较小范围。
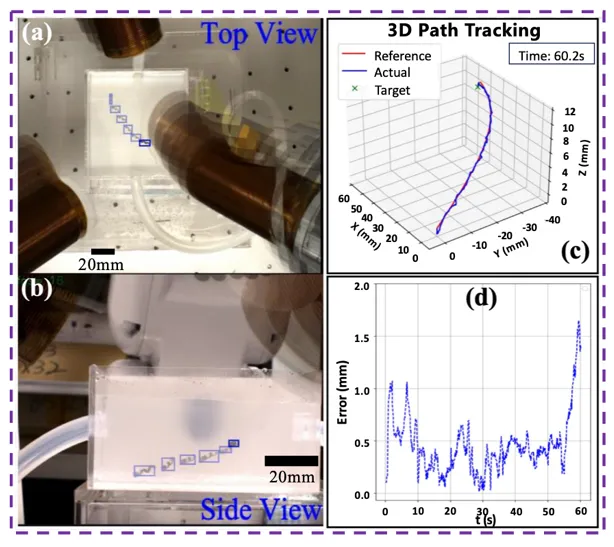
图8. 帕累托最优线圈构型下机器人在3D空间中路径跟踪控制
4.实时生成帕累托最优线圈构型消除3D管道环境中梯度力影响的研究
在之前的实验过程中,线圈构型一直保持不变,而在本实验中,研究团队展示了在机器人控制过程中如何从非优化线圈构型切换到帕累托最优线圈构型,以消除梯度力的影响。为了进行对比,在实验前半段(图9(a),案例I和案例II中使用了相同的线圈构型来驱动机器人。图9(b)显示,在这两种案例下,机器人都受到了梯度力的影响,但在案例II中,当线圈构型变换到帕累托最优线圈构型时,梯度力显著降低(从61.4 mN下降到4.2 mN),这种降低是因为优化的线圈构型有效地减轻了意外梯度力的影响,机器人恢复正常运动,如图9(c)所示。
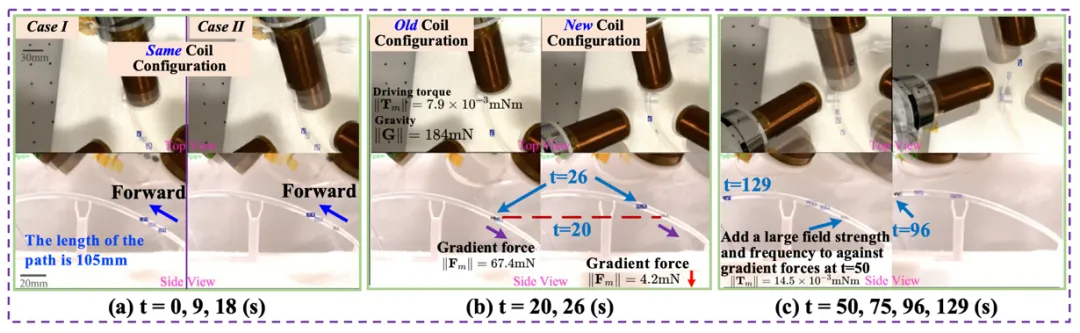
图9. 帕累托最优线圈构型在3D管道环境中消除梯度力对机器人影响的对比实验
上述各项实验结果均有力地证明,研究团队所提出的优化策略及开发的系统在磁操纵领域展现出了卓越的性能,同时展现出了极强的适应性和可扩展性,能够轻松应对多样化的可变环境挑战。
尽管研究团队已经取得了显著成果,但现有的方法仍面临一些局限性,尤其是在生物流体环境等生理条件下的应用亟待深入研究和解决。团队将继续推动磁驱动机器人及其驱动系统在更复杂、更多变场景中的应用,积极探索创新方法,聚焦于开发基于人工智能驱动的磁控机器人系统,确保其在生物医学及其他前沿领域中实现更加精准、可靠的运动控制,并进一步拓展应用前景。