

集成技术期刊《机构与机器人学——现代机器与装备的创新利器专题( I )》上线
上海交通大学的科研团队围绕轮式移动系统开展系统研究,针对崎岖地形翻越、垂立壁面爬升、地面全向移动等场景要求,提出了三模式变形轮、磁吸附轮、变参数全向轮等 3 类新型结构轮,及相应的轮式移动平台方案;中国科学院深圳先进技术研究院的科研团队设计了一种具有壁面自适应能力的磁吸附爬壁机器人,为船舶货舱清洗过程中多壁面过渡问题提供了解决方案;中国科学院深圳先进技术研究院与日本国立电气通信大学联合组成的科研团队在分析人手 16 种日常抓取动作功能性归类的基础上,设计了一种新型假肢手结构,仅用 3 个电机实现 11 种假肢手动作,有效克服动作多和轻量化的矛盾;华南理工大学的科研团队[4]基于主动加被动的仿生推进原理设计了两段主动刚体与两段被动顺从体相结合的新型欠驱动仿生机器鳗鱼,提出基于深度强化学习算法的机器鳗鱼控制方法;上海宇航系统工程研究所领头的科研团队针对空间直立桁架结构的人-机协作装配任务,基于机构学原理进行桁架模块单元构型、桁架装配过程数学建模以及人-机协作的装配任务规划,为空间大型设施在轨构建提供技术原理支撑。上述工作将在本期刊出。
下一期将刊出文章分别介绍清华大学、俄亥俄州立大学、北京交通大学以及上海交通大学的科研团队的相关研究进展以及研究评述与展望,涉及变刚度机构、机构与艺术协同创新、机构创新促进新装备研发等主题。
此外,本期也收录了《生物医药与生物医学工程》、《电子信息》领域的三篇文章。欢迎关注。
图:《集成技术》2022年第4期封面
● 客座编辑
郭为忠教授
上海交通大学
郭为忠,上海交通大学长聘教授,博士生导师。担任 IFToMM(国际机构学与机器科学联合会)中国委员会副主席,IFToMM 常设教育委员会委员,Mechanism and Machine Theory 副编辑,《机械设计与研究》期刊副主编。从事机构与机器人学、并联机器人和重大装备创新设计等研究与教学工作,先后主持承担国家自然科学基金青年/面上/重点项目、国家重点研发计划项目、国家 863 计划课题、国家科技重大专项课题、航空航天科研院所及企业攻关项目等 30 余项;发表 SCI/EI 期刊论文 100 余篇;获国家发明专利授权 50 余项,软件著作权登记 6 项;获省部级一等奖 5 项、“中国好设计”创意奖 2 项;获 IFToMM 世界大会最佳论文提名奖、《机械工程学报》期刊创刊 60 周年优秀论文奖和首届高影响力论文奖等。

何凯
正高级工程师
中国科学院深圳先进技术研究院
何凯,博士,正高级工程师,博士研究生导师,中国科学院深圳先进技术研究院集成所精密工程研究中心主任,中国科学院关键技术人才。主要研究方向为精密制造及自动化技术、工业/特种机器人、生物制造自动化技术、金属成形技术及装备等。累计发表论文 120 余篇;申请各类专利 140 余件,已授权专利 90 余件,其中发明专利授权 50 件,国外专利授权 2 件。主持国家重点研发计划,多项工业和信息化部、中国科学院、广东省、深圳市科技项目,以及企业委托开发项目。担任《集成技术》期刊编委、《合成生物学》期刊编委,深圳市人工智能学会理事。
●序言:机构与机器人学——现代机器与装备的创新利器
链接:https://jcjs.siat.ac.cn/jcjs/article/abstract/202204000
●轮式机器人:创新设计与实验研究
链接:https://jcjs.siat.ac.cn/jcjs/article/abstract/202204001
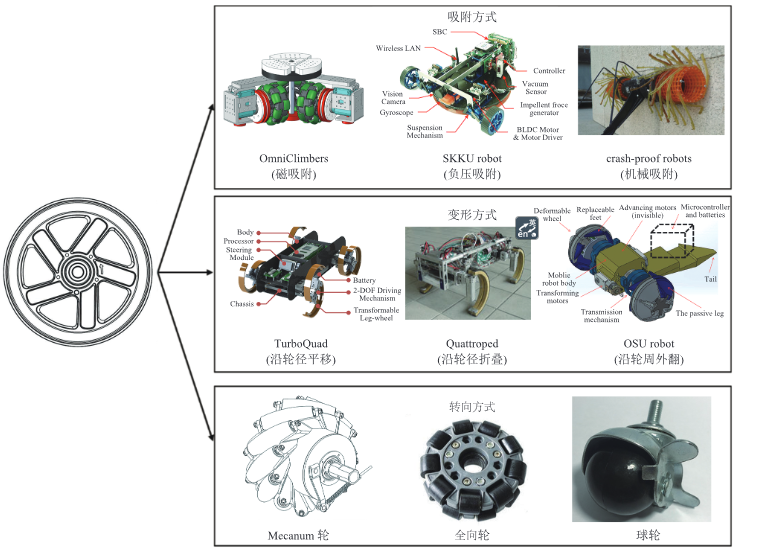
摘要:轮子是人类的一项伟大发明,轮式移动系统为人类的生产和生活带来了极大便利,机器人采用轮式移动系统是一个十分重要的发展方向。为克服普通轮子对复杂地形适应性不足的问题,研究者们在轮子与行驶表面的吸附方式、轮子自身的几何形态、行驶过程中的转向方式等方面进行了探索。在轮子将滑动摩擦转变为滚动摩擦这一移动机理的基础上,针对崎岖地形翻越、垂立壁面爬升、地面全向移动等场景要求,该文提出了三模式变形轮、磁吸附轮、变参数全向轮等 3 类新型轮子结构,及其相应的轮式移动结构;通过连杆机构实现了三模式变形轮在圆轮模式、爪模式、勾模式之间的切换和机器人的双向越障;通过磁吸附轮结构和被动三自由度悬架,使全部轮子始终贴合壁面,实现了机器人的壁面行驶;通过空间机构调节辊子安装角参数,使轮子摩擦力方向受控,保障了机器人的全向行驶;通过样机搭建和实验研究,验证了该文所提创新设计的可行性。
●具有壁面自适应能力的磁吸附爬壁机器人设计
链接:https://jcjs.siat.ac.cn/jcjs/article/abstract/202204002
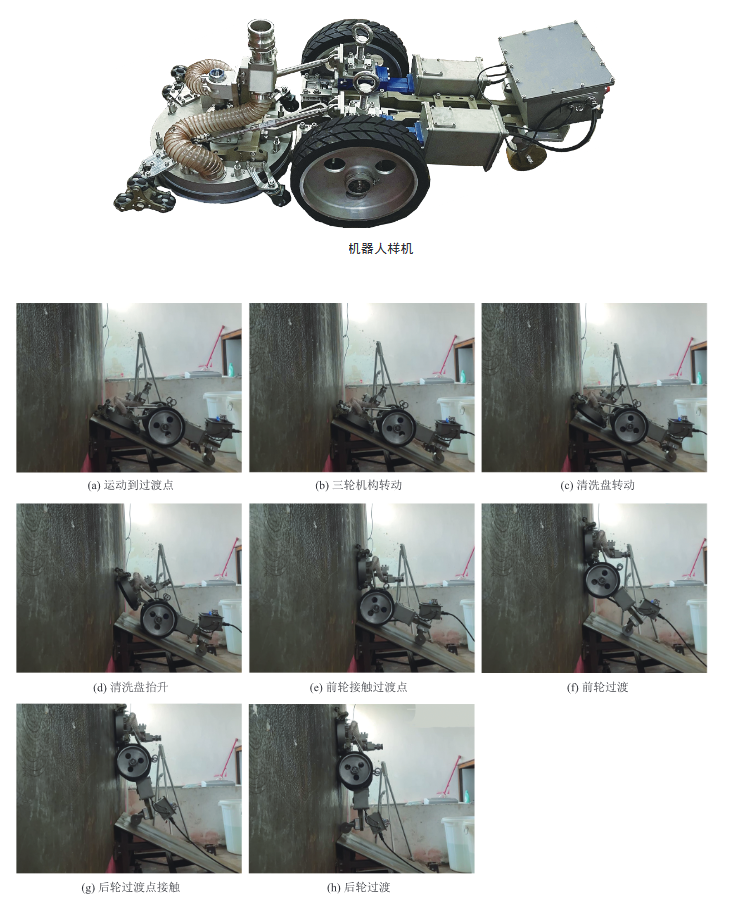
摘要:为解决爬壁机器人在船舶货舱清洗过程中多壁面过渡的问题,该文设计了一种具有壁面自适应能力的磁吸附爬壁机器人,其包括磁吸附机构、自适应清洗机构和行走机构。该文首先通过建立机器人壁面过渡时的力学模型,得到机器人磁吸附力的分布特点,并据此设计出一种弧形磁吸附机构。然后利用 ANSYS Maxwell 3D 软件对该机构磁吸附力的分布进行优化,以满足壁面过渡的需要;此外,还在机器人前端设计了一种自适应清洗机构,通过对该机构的结构原理进行分析和实验,验证了清洗机构也具有壁面过渡能力。最后通过模拟船舶货舱壁面的实际特点,对机器人样机进行壁面过渡综合实验,完成了机器人舱底过渡行走实验和舱顶过渡行走实验,验证了该机器人的壁面自适应和舱内行走的能力。
● 兼顾多动作与轻量化的仿生假肢手设计创成
链接:https://jcjs.siat.ac.cn/jcjs/article/abstract/202204003
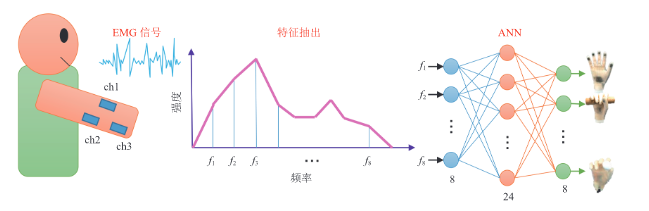
摘要:假肢手的动作数量与轻量化之间存在矛盾关系,为兼顾两者之间的平衡,满足假肢手多动作和轻量化的要求,该研究通过分析人手的16种日常抓取动作,设计了一种合理的电机驱动结构。该结构在四指中应用了多关节同时屈曲传动,在拇指中应用了定轨迹适应性传动,掌骨使用可自动切换为弧面和平面的对称弹性串联驱动式传动,以及配置五指的自动伸展,将这些机能融合在假肢手中,仅用3个电机实现了11 种假肢手动作,达到了132.1 g的轻量化设计。该文还通过肌电信号结合神经网络算法,实现了假肢手直觉控制,并验证了其具有良好的抓取稳定性和操作性。
● 基于深度强化学习的欠驱动仿生机器鳗鱼控制研究
链接:https://jcjs.siat.ac.cn/jcjs/article/abstract/202204004
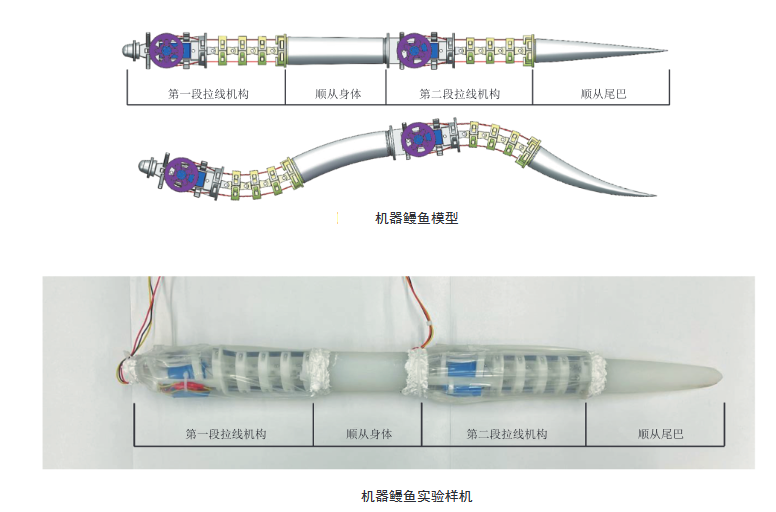
摘要:水下仿生机器人具有高效率、高机动性、低噪声等优点,针对仿生机器鳗鱼存在设计复杂、控制难度大等问题,该文提出了一种新型欠驱动机器鳗鱼的控制方法。首先,基于主动加被动的仿生机构推进原理,设计了两段主动体与两段被动顺从体相结合的机器鳗鱼仿生机构;然后,在仿真环境中进行建模,利用深度强化学习算法进行数据收集和训练,选择表现良好的神经网络在仿真环境中进行控制测试,从而得到机器鳗鱼的控制函数;最后,通过对比实验,验证了该文设计方法的可行性以及控制函数的有效性,实现了对机器鳗鱼的控制。
● 空间桁架的人-机协作装配规划与试验验证
链接:https://jcjs.siat.ac.cn/jcjs/article/abstract/202204005
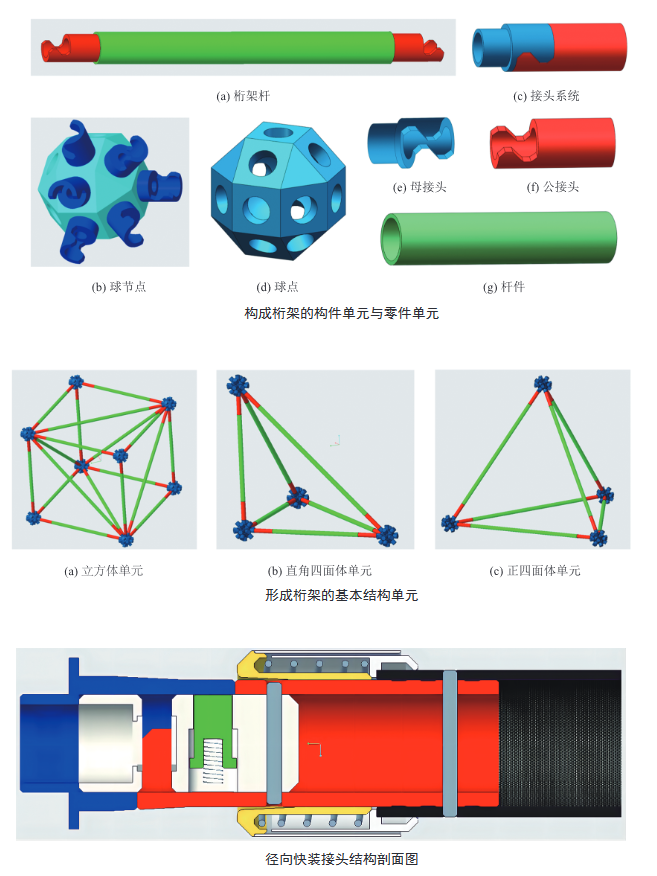
摘要:该文以空间直立桁架结构的人-机协作装配流程为研究对象,提出一种适用于径向快装桁架模块单元的创新构型,建立了基于状态矩阵和邻接矩阵的桁架结构装配序列、装配模式和装配过程的数学模型。该文还对空间环境下桁架装配的人-机能力约束进行分析,提出基于动素分析的装配任务层级化分解方法,利用比较分配原则制定了适用编程的人-机协作装配任务流程和分配方案。基于所提出方案,通过开展人穿戴模拟宇航服与机械臂协作装配 5 m 长直立桁架结构的地面演示试验,验证了该方案的合理性和组装流程的可行性,为空间大型设施在轨构建提供了技术原理支撑。
专栏:生物医药与生物医学工程
● 三种近交系小鼠自发行为图谱的构建与比较
链接:https://jcjs.siat.ac.cn/jcjs/article/abstract/202204006
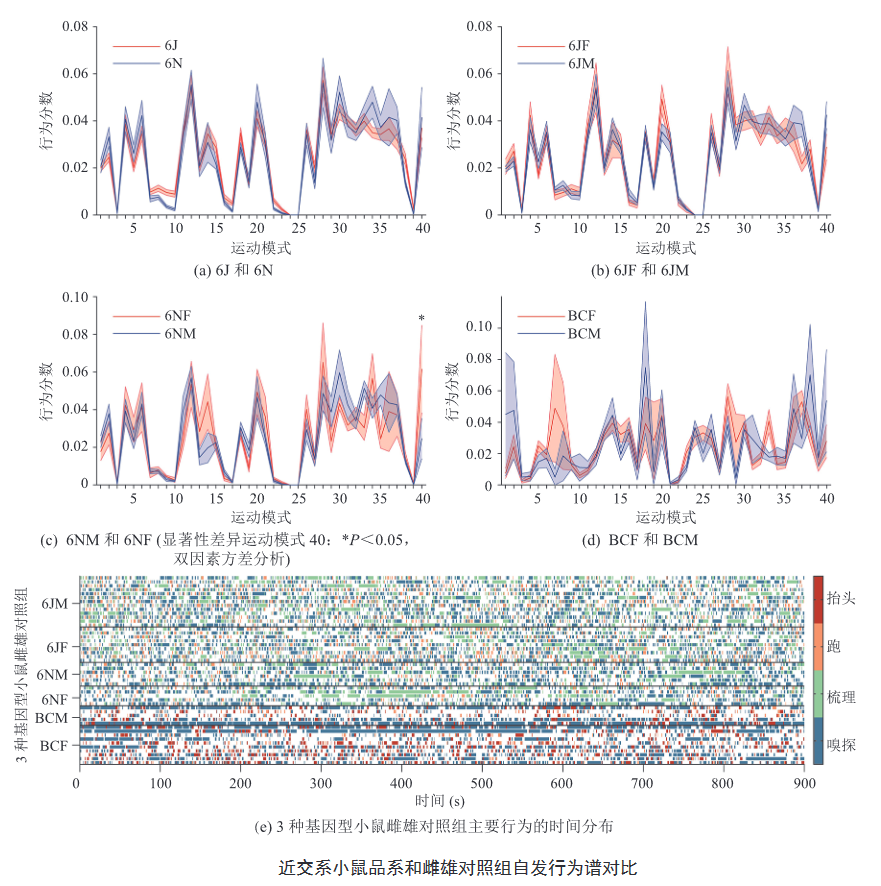
摘要:小鼠被广泛应用于各类生理、病理和行为学实验。不同基因型小鼠的自发行为差异对实验设计和结果的影响尚未明确。该文选择目前常用的 3 种近交品系小鼠 C57BL/6J、C57BL/6N、BALB/c(简称 6J、6N、BC),利用基于层次化三维动物行为特征的无监督学习框架,对其自发行为进行了客观评估。实验结果表明,基因型显著影响小鼠的自发行为,影响因素造成的差异强度为:远基因型>近基因型>雌雄对照。具体表现为,BC 与 6J 和 6N 的体态明显不同,且在“抬头”“梳理”“跑”3 种运动模式上,BC 行为明显异于 6J 和 6N。6J 和 6N 的行为谱虽较为类似,但 6N 的嗅探行为明显多于 6J。该研究结果可作为小鼠模型实验设计、品系选择和样本量确定的参考。
专栏:电子信息
● 基于三维视觉的机器人安全预警系统
链接:https://jcjs.siat.ac.cn/jcjs/article/abstract/202204007
摘要:在许多自动化应用场景中,如装配和分拣过程中,工业机器人的应用是提高生产质量和生产效率的一个重要环节。在机器人工作过程中,保证机器人和工人工作的安全,是推动机器人应用和发展的首要前提。该文提出一种基于三维视觉的机器人安全预警系统。首先,该系统利用三维相机对监控场景进行高精度三维重建,并将多个点云进行融合;然后,提取人体关键点,并根据三维人体关键点判断人与机械臂的安全距离;最后,计算判断人体与机器人是否处于设定的安全距离范围,并据此控制机械臂的工作状态。实验结果表明,该文所开发的安全预警系统能保障大视野范围内的人员安全

● 基于拓扑非线性动态建模的神经退行性疾病异常步态识别
链接:https://jcjs.siat.ac.cn/jcjs/article/abstract/202204008
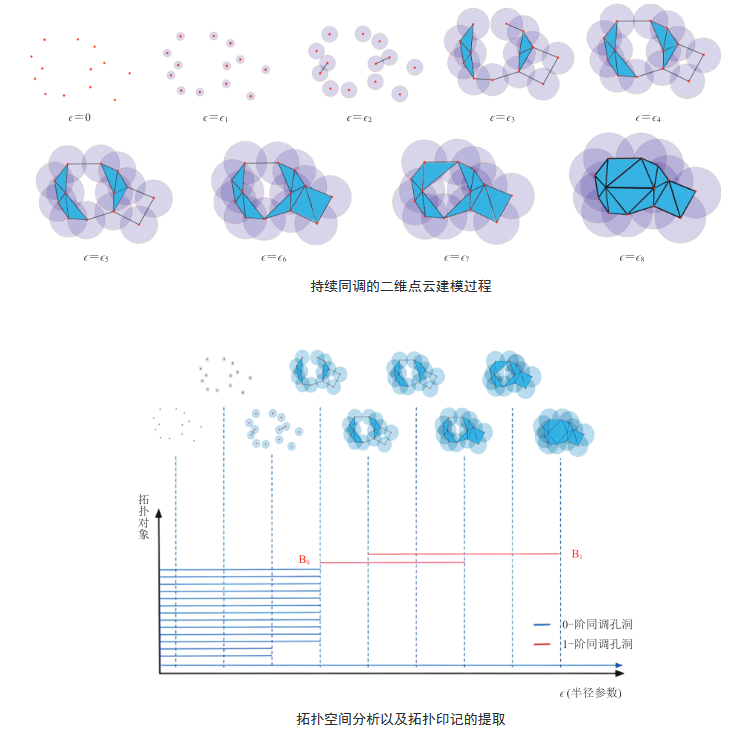
摘要:通过对步态节律变化的观察,可以实现对人体复杂系统的观测,在行走过程中,步幅间隔时间序列的动态特性,能有效反映人体系统的状态变化,可用于步态异常检测及相关疾病辨识。人体步态传感信息的时间序列相空间重建,是一种有效表征系统非线性动力学特性的建模方法。相空间的几何建模和统计分析,是异常步态识别典型的分析方法,被广泛应用于神经退行性疾病检测等临床研究中。该文从空间拓扑特性分析的角度出发,提出一种基于拓扑非线性动态建模的分析方法,用于神经退行性疾病的异常步态识别。该文首先采用延时嵌入的相空间重构方法,将步态的波动时间序列转化为抽象相空间的状态点云;其次,采用基于计算拓扑中的持续同调工具,提取状态点云所在空间的拓扑描述信息;再次,采用基于拓扑描述的持续态势图,构建时间序列的拓扑非线性动态特征;最后,融合步态周期中左右足的步幅间隔、站立间隔、摆动间隔时间序列的拓扑非线性动态特征,作为分类器输入,构建出异常步态的机器学习识别模型。对患有肌硬化症、亨廷顿病和帕金森病的神经退行性疾病患者,进行 5 min 异常步态的连续行走数据(50 步滑动窗数据)测试,步态识别的准确率分别为 0.875 0(0.914 6)、0.940 6(0.962 3) 和 0.958 3(0.961 4)。因此,拓扑非线性动态建模分析是一种有效的神经退行性疾病异常步态检测方法,为基于步态分析的神经退行性疾病检测和可穿戴数据分析提供了一种新的思路。
关于《集成技术》
《集成技术》(CN 44-1691/T,ISSN 2095-313)系由中国科学院主管,中国科学院深圳先进技术研究院和科学出版社主办的理工科综合性学术刊物,以促进多学科交叉融合创新、促进科研成果与实际应用的交流与转化为宗旨,聚焦多学科交叉集成创新前沿,重点关注信息技术、生物技术、新能源与新材料等领域。杂志官网:http://jcjs.siat.ac.cn/jcjs/home。
联系方式:
《集成技术》编辑部
Email: jcjs@siat.ac.cn
电话:0755-86392070
传真:0755-86392073
地址:深圳市南山区西丽深圳大学城学苑大道1068号
